SLAM100 Product Analysis and Underground Space Information Solutions
With the rapid development of urban construction in our country, urban underground space informatization is increasingly valued by industry managers - underground space data is an indispensable and important part of urban construction, realizing three-dimensional informatization of underground space and building a three-dimensional city, providing scientific and technological support for the rational development of urban underground space resources, has become one of the most effective measures to solve urban problems. Therefore, studying high-efficiency, high-precision, and all-factor three-dimensional information acquisition and expression methods in underground space plays a crucial role in promoting urban construction and improving the level of urban informatization.
Measurement Difficulties
Urban underground space has unique characteristics and conventional measurement methods often encounter many technical difficulties and bottlenecks during measurement.
1) The structure of underground space is complex, with many structures and different shapes. It is difficult to obtain full-picture data at one time with a single technical means;
2) It is difficult to directly use GNSS to assist measurement in underground space, and there is an urgent need for a new data acquisition method to replace the traditional operation method that relies heavily on GNSS and other technical means;
3) The underground space has limited opening hours for measurement, requiring efficient and convenient measurement methods. Public open spaces such as subways and underground shopping malls are densely populated, and movable objects such as crowds and vehicles have a greater impact on traditional measurement and three-dimensional laser scanning. Measurements need to be carried out when the crowd is sparse or at night; entry review for non-open spaces Strictly, such as civil air defense projects, underground municipal facilities, etc., each time a measurement is performed, permission from the management department is required, and the measurement time must be strictly controlled.
At present, underground space measurement methods mainly include traditional measurement methods, static 3D scanning and mobile 3D scanning.

Product Description
SLAM100 is the first handheld mobile lidar scanner we launched. It is the most industrialized, integrated and commercialized product among similar products at home and abroad. The system has a 360° rotating pan-tilt, combined with an industry-level SLAM algorithm, which can obtain high-precision and high-definition three-dimensional point cloud data of the surrounding environment under no light and no GPS conditions, and has indoor and outdoor integrated spatial data collection capabilities.
SLAM100 adopts an integrated structure design, has built-in control and storage units, uses replaceable lithium batteries, and has a one-click start operation function, making data acquisition more efficient and convenient.
Software Algorithm
SLAM GO is a mobile APP software used in conjunction with SLAM100. It is wirelessly connected to the device and supports real-time data display, 2D/3D and slice display. It can view and manage projects and automatically synchronize with cloud project information to display operation time, location, project overview, Data overview, etc.; operations such as firmware upgrade and device maintenance.
SLAM GO POST is a PC-side application software based on Drone Manager, which can realize functions such as data post-processing, color point cloud production, data splicing, data optimization, browsing and measurement. It supports one-click point cloud calculation and can check the calculation situation in real time. You only need to import the data folder of the collection project to produce high-precision coloring and optimized point clouds and panoramas; it has the automatic recognition function of control points and can directly Produce outcome data with absolute coordinates.
SLAM100 is capable of starting from an unknown location in an unknown environment, simultaneously positioning and acquiring spatial three-dimensional data and constructing an incremental map of the surrounding environment during movement, and is suitable for various underground space application scenarios.
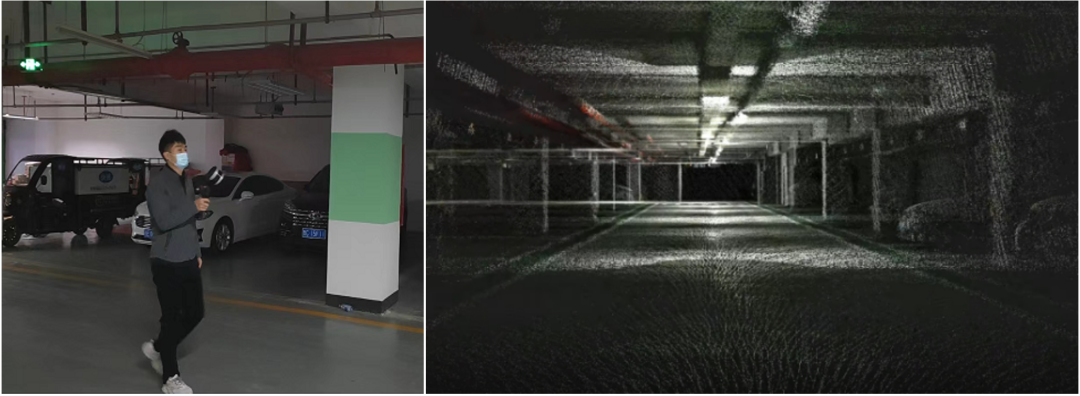
Underground Garage
The particularities of underground garages such as poor visibility and complex structures determine that it is difficult to use conventional instruments to collect data during three-dimensional modeling. Three-dimensional laser scanning technology uses non-contact measurement methods to accurately obtain the spatial geometric information of the measured object. Its dense point cloud data can quickly reconstruct the three-dimensional model of the object, and can accurately measure every corner of the underground garage to achieve precise positioning inside the parking lot.
Civil Air Defense Project
The civil air defense project is a special underground building with protection requirements, forming a network of tunnels extending in all directions. In the early days, it was difficult for relevant departments to grasp the basic information of civil air defense projects very comprehensively and there might be errors. With the advancement of technology, supplementing basic information on civil air defense projects has become a key task for relevant departments. The use of mobile handheld SLAM scanners can achieve continuous scanning, eliminating the stitching process, and quickly obtain basic data of old civil air defense projects.

Subway Tunnel
The subway is a fast, large-capacity, electric-powered rail transit system built in the city. During the entire life cycle of subway construction and operation, it is particularly important to promptly grasp the current status of existing subway lines. Existing basic data can provide necessary data reference for decision makers, thereby optimizing subway line management.
SLAM100 can effectively solve the measurement problems of complex underground spaces, special-shaped structures, and fragmented structures. Compared with traditional GNSS receivers, total stations and static scanners, they have the following characteristics:
1) The point cloud data structure is rich in information and can scan and record all structures within sight. For some obstructing structures, you can directly bypass them and scan around the structures to obtain full picture data;
2) Underground space point cloud data can be continuously acquired, and three-dimensional point cloud data of different structures, rooms, and orientations in underground space can be connected within a complete spatial range, and data quality inspection, integrity inspection, and logical structure inspection can be performed. The language is very intuitive and clear;
3) The images obtained by the three panoramic cameras that come with SLAM100 can be automatically matched with point clouds to generate colored point clouds. The structure information scanned based on the color point cloud is the same as the color and texture of the structures in the actual underground space, which provides an intuitive reference for subsequent three-dimensional modeling, structure vectorization, and structural attribute identification. Especially for the measurement of some detailed textures and special-shaped structures, color point clouds will greatly reduce the workload of subsequent modeling and improve work efficiency.
