D20 Equipped with DV-LiDAR10 Complex Mountain Measurement Application Case in Yunnan Mountain Area
Mountain terrain surveying has always been one of the important application scenarios of airborne lidar. When using lidar for mountain surveying, it is necessary to select a radar payload with characteristics such as high accuracy, high point frequency, high penetration, and high echo number. A payload with such performance can ensure that the laser can pass through dense vegetation and obtain more and more accurate mountain ground point cloud data, thereby producing high-precision, high-quality mountain terrain results.
DV-LiDAR10 is the first domestic long-range lidar payload launched by Foxtech Robot. It can meet all the needs of mountain topographic survey. It can be mounted on Foxtech Robot V10 vertical take-off and landing drone platform and D20 multi-rotor drone according to different aerial survey requirements. The machine platform can meet the needs of large-scale, large-height difference, and high-precision mountain topographic survey work.

DV-LiDAR10
1.1 Introduction to the survey area
The survey area is located in the northern part of Kunming City, Yunnan Province. Foxtech Robot cooperated with a Class A surveying and mapping unit to conduct mountain topographic surveys for its key tunnel projects. The survey area covers an area of about 0.24 square kilometers, and the overall height difference is about 300 meters. The survey area has dense vegetation and varied terrain, which is a typical mountainous terrain.
1.2 Equipment Introduction
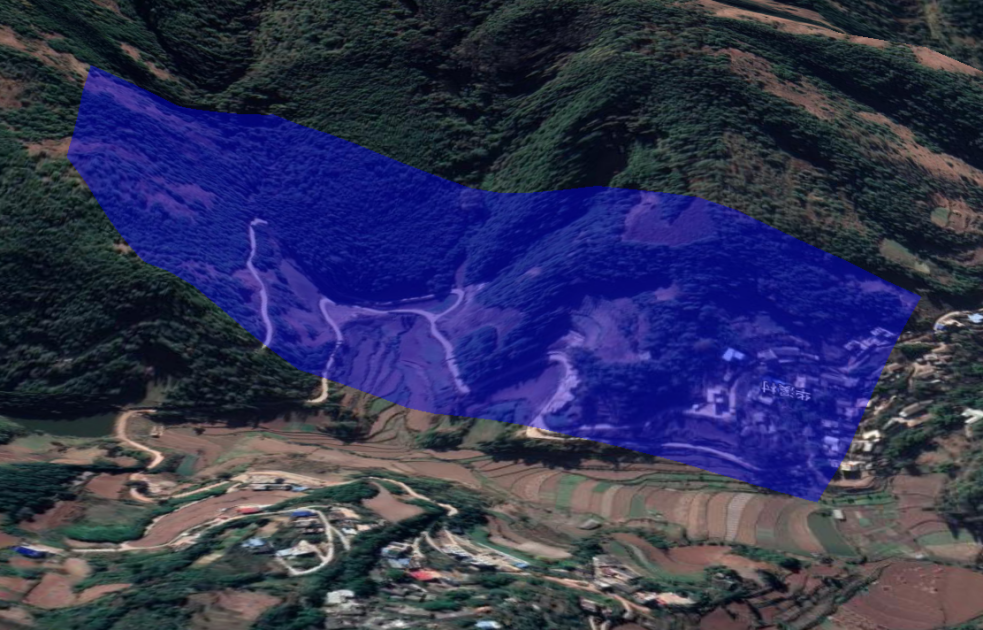
Since the project area has complex mountainous terrain with large height differences, and the tunnel project requires high elevation accuracy, the D20 flying platform equipped with DV-LiDAR10 laser radar was finally selected for data collection based on the characteristics and accuracy requirements of the measurement area. The measurement area scene is shown below.


Real shots in the testing area
DV-LiDAR10 is mainly composed of long-range lidar, high-precision POS system and high-resolution full-frame digital camera. The detailed parameters are shown in the table below.
DV-LiDAR10 has the characteristics of high point frequency, high precision, high echo number, and high penetration. It can penetrate dense vegetation areas and obtain a large number of high-precision mountain ground point clouds. At the same time, it is equipped with a 42-megapixel high-resolution full-frame digital camera, which can obtain high-definition ground images while acquiring point cloud data.
The D20 flying platform equipped with LiDAR10 can actually last about 40 minutes, has a wind resistance level of 6, and can carry out fully automatic altitude-changing flights under large altitude differences to meet the high-precision and high-efficiency requirements of field data collection.

D20 equipped with DV-LiDAR10
2.1 Work Process
In order to cope with the height difference in the survey area and the high-precision collection requirements of the project, field personnel first surveyed the survey area, selected appropriate take-off and landing points, and planned reasonable routes for field collection; then, drone stewards were used and other software for in-house data processing to generate a series of mountain terrain measurement remote sensing products to provide data support for the development of subsequent projects.
2.2 Field Flying
In measuring areas with large altitude differences and complex environments, in order to ensure the stability of the accuracy of data results, it is generally necessary to keep the relative height of the aircraft and the ground constant, that is, to plan a flight route with higher altitudes. The "Smart Route" module of UAV Manager provides automatic altitude-changing route design to meet the flight needs of complex measurement areas with large altitude differences. You only need to import the measurement area range, enter the corresponding altitude and speed, and select the altitude-variable route. The remaining parameters will be automatically calculated by the drone steward based on the input parameters. After the calculation is completed, the drone steward will automatically complete the route design based on the ground height and related parameters to ensure that the height of the aircraft relative to the ground remains stable.
The design altitude of this project is 270 meters, and the design flight speed is 8 meters/second. The total flight distance is calculated by the drone steward to be about 6 kilometers, and the estimated flight time is 16 minutes. Other parameters and route design are as follows.
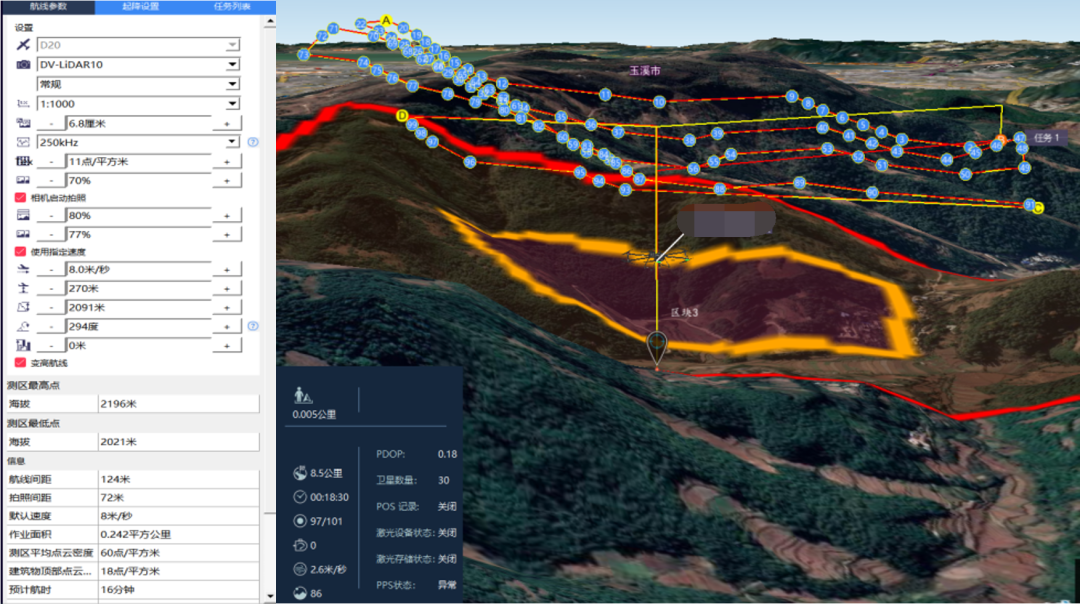
Butler flight parameters and route design
After the route planning is completed, the D20 and DV-LiDAR10 are assembled and placed at the take-off and landing point. Through the "intelligent flight" module of the drone manager, the aircraft is controlled to take off automatically and data is acquired along the designed route. After completing the expected flight mission, the drone will automatically return to the take-off and landing point without manual intervention.
2.3 In-house Preprocessing
(1) Trajectory solution
Copy the original point cloud, IMU data, POS data and other necessary data obtained by the field to the computer and confirm the integrity of the data. The first step in in-house processing is trajectory calculation, and its calculation accuracy is directly related to the accuracy of the final result.
First, the airborne POS is formatted using the "Intellectual Map" module of UAV Manager, and the converted POS data is used to download the base station file. The format-converted POS data, base station files and IMU data are imported into the trajectory calculation software. , input the eccentricity parameters and IMU model corresponding to DV-LiDAR10, use the tight coupling method to solve the trajectory, and finally output the trajectory and camera shooting point POS results that meet the accuracy requirements.
(2) Point cloud calculation
Input the calculated trajectory data and point cloud data into the "Smart Laser" module of UAV Butler, and enter necessary information such as project path, coordinate system, and load number according to the prompts. UAV Butler will automatically download based on the load number and other information. Cloud calibration report to ensure the accuracy of point cloud calculation. After confirming that the input information is correct, click Point Cloud Solve and the butler will automatically generate high-precision point cloud data, as shown in the figure below.
Point cloud solution results
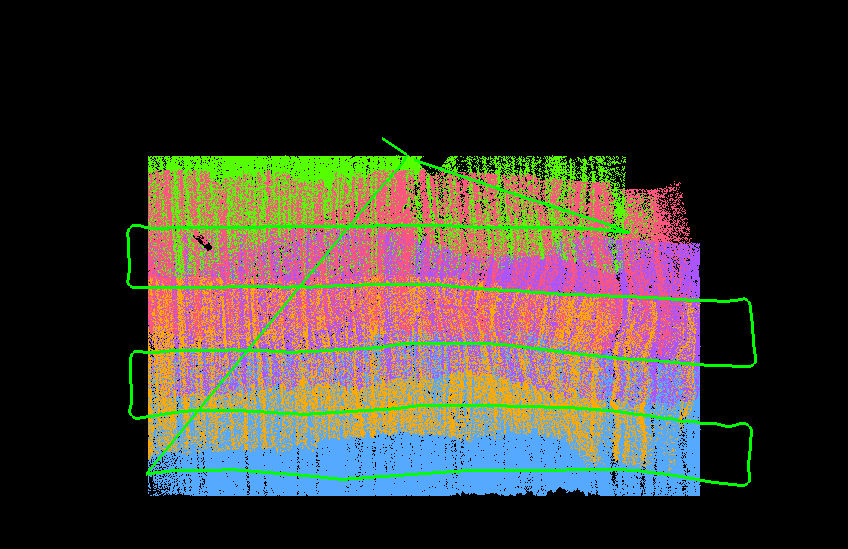
In order to verify whether there is stratification in the solved point cloud data, the "Smart Laser" module not only provides profile tools, but also provides quality inspection tools to quickly detect the stratification between each route (the darker the color, the deeper the layer. the more obvious). If there is obvious stratification, air belt adjustment can be used to weaken the stratification phenomenon and improve data quality. The quality inspection chart for this project is shown below.
Measurement area quality inspection map
As shown in the figure above, the point cloud data obtained by this project has no obvious stratification after processing, indicating that the quality of the data obtained by the radar is good and can be used for subsequent processing and production.
(3) Mountain terrain survey
Mountain terrain survey results mainly include survey area orthophotos, color point clouds, feature classification and extraction, high-precision DEM and contours, etc.
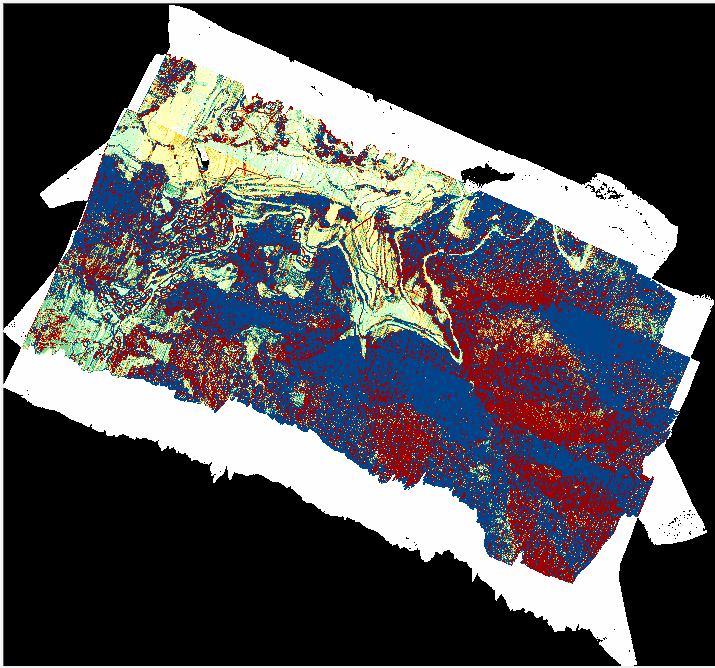
Orthophotos can obtain high-definition images of ground objects in the survey area, and can also obtain DSM of the survey area, which can help staff quickly understand the environment of the survey area and formulate more effective operation plans. DV-LiDAR10 is equipped with a 42-megapixel full-frame camera that can obtain high-resolution ground remote sensing images. Import the survey area images and photo point POS acquired by it into the "Smart Puzzle" module of Drone Manager to automatically generate a survey area. Orthophoto and DSM, the results are shown in the figure below.
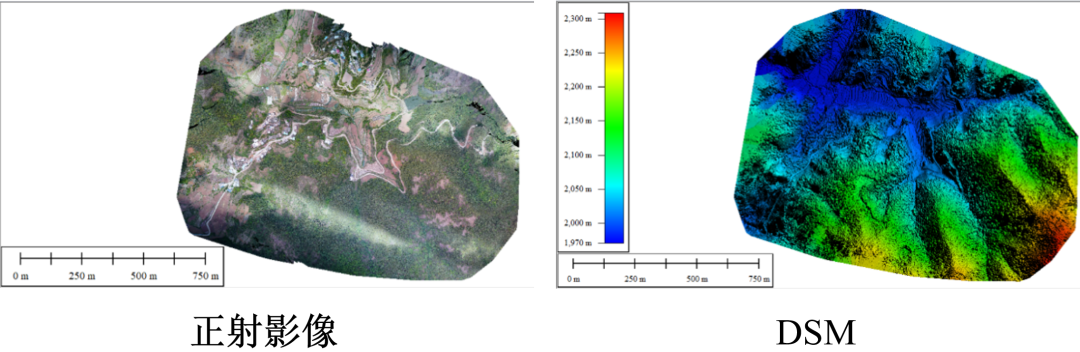
Orthophotos and DSM
Colored point cloud is a point cloud result generated by standard point cloud data and orthophoto. It not only has the elevation information of standard point cloud, but also contains the color and texture information of orthophoto. This presentation form makes the data dimensions richer and improves the readability and appreciation of point cloud data. Select the coloring option in the drone manager "Smart Point Cloud" and enter the point cloud data and orthophoto data required for coloring, and a color image will be automatically generated, as shown below.
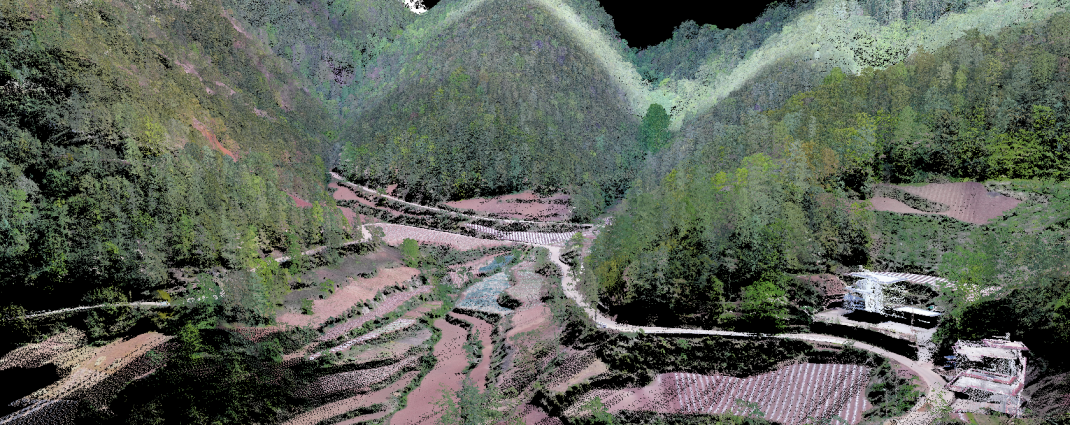
Color point cloud of survey area
DEM is a remote sensing result generated from ground point cloud data, which can accurately reflect the elevation information of the ground. It is one of the main results of mountain topographic survey. Since the mountainous areas of Yunnan are covered by dense vegetation all year round, if you want to obtain a large amount of accurate ground point data, you need a radar payload with characteristics such as high penetration and high echo number. DV-LiDAR10 is equipped with a purely domestic long-range lidar. This payload uses 1550nm laser as the detection light source, has 7 echoes, and has all the characteristics required for mountain measurement.
Use the profile tool to observe the mountain point cloud data obtained in this project as shown in the figure below.
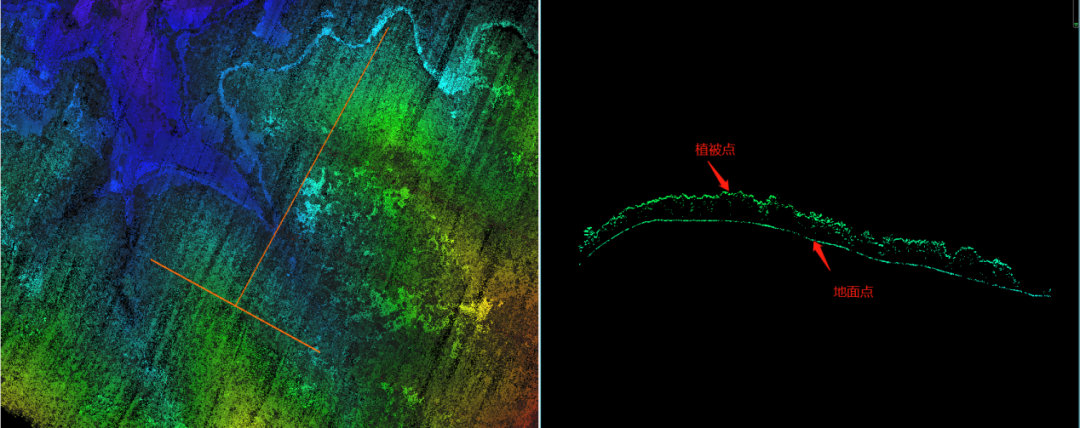
Mountain point cloud data profile
As shown in the above figure, DV-LiDAR10 can not only obtain vegetation point data, but also obtain a large amount of ground point data, indicating that the device has good penetration and is very suitable for mountainous terrain measurements.
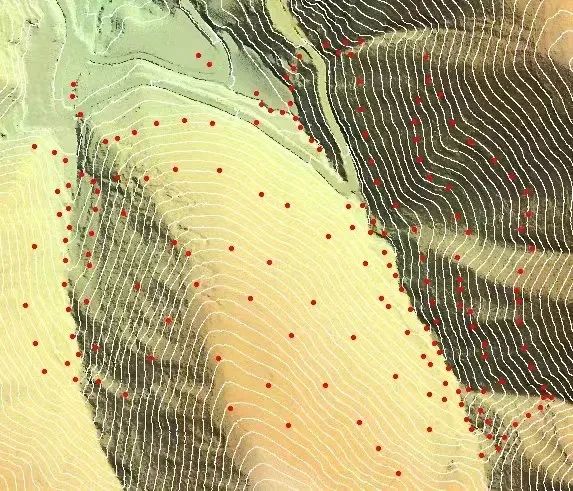
In order to generate high-precision DEM and contours, first import the processed standard point cloud data into the "Smart Point Cloud" module of UAV Butler, and then use the ground point extraction tool to extract the height of ground objects, the maximum slope threshold and the iteration angle. Wait for the parameters to be input, and then select a suitable filtering algorithm to realize automatic extraction of ground points. Finally, manually check the accuracy of ground point extraction, optimize the areas with poor accuracy, and generate the DEM and contour of the survey area based on the optimized ground point data. Wire. In order to verify the DEM accuracy, this project uses RTK and other tools to collect field control points, use them as check points and import them into the DEM model, as shown in the figure below.
The survey area of this project is a mountainous area in Yunnan. D20 equipped with DV-LiDAR10 is used to conduct mountain terrain survey. Through the acquisition of orthophotos, color point clouds, classification of ground objects in the survey area, high-precision DEM and other high-precision mountain terrain results, It can be seen that the DV-LiDAR10 has the characteristics of high precision, high penetration, and can simultaneously acquire ground object images and point cloud data, as well as the high efficiency, high-precision and high-altitude flight capabilities of the D20 flight platform, which is suitable for large height differences and high-precision Importance of mountain topography. Finally, ground control points were used to verify that the project results had high accuracy and met the project requirements.
