Large Storage Tank Volume Calculation - Slam100
With the rapid development of the national economy, the number of storage tanks continues to increase, and has become a major basic key equipment for oil and gas resources and chemical material storage. At the same time, storage tanks are also developing towards larger sizes, which puts forward higher requirements for tank volume measurement in storage and transportation projects. At present, commonly used measurement methods at home and abroad include the girth method, the optical reference line method, the optical measurement method with guide rails, and the three-dimensional laser scanning measurement method. Station scanner, this kind of instrument has the advantages of high precision, high density, and long distance measurement, but it also has problems such as low efficiency, frequent station changes, and large amount of splicing in the office.
With the rapid development of the national economy, the number of storage tanks continues to increase, and has become a major basic key equipment for oil and gas resources and chemical material storage. At the same time, storage tanks are also developing towards larger sizes, which puts forward higher requirements for tank volume measurement in storage and transportation projects. At present, commonly used measurement methods at home and abroad include the girth method, the optical reference line method, the optical measurement method with guide rails, and the three-dimensional laser scanning measurement method. Station scanner, this kind of instrument has the advantages of high precision, high density, and long distance measurement, but it also has problems such as low efficiency, frequent station changes, and large amount of splicing in the office.
With the rapid development of mobile handheld 3D laser scanners, it provides a new technical means and method for obtaining rich spatial information of storage tanks. It relies on SLAM algorithms to construct continuous 3D spatial point cloud maps without frequent station changes. Taking the vertical storage tank in a large farm as an example, the editor will introduce how SLAM100 quickly completes the calculation of the storage tank volume.
Background and Needs
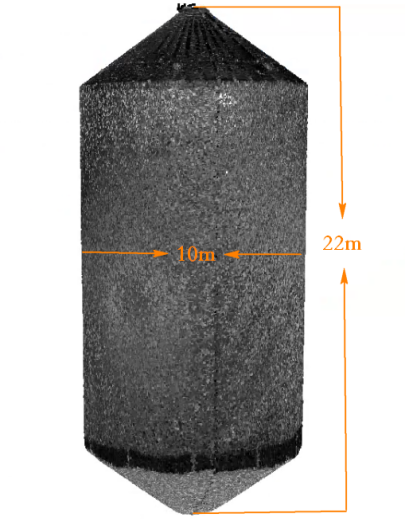
In order to improve the management level and realize the dynamic and precise control of feed, a large-scale breeding farm needs to grasp the empty volume inside the feed tank in time to provide decision-making assistance for feed production and distribution plans. The height of the tank is about 22m, the diameter is about 10m, the top and bottom are cones, and the middle is a cylinder.

The maximum distance measurement (120m) of SLAM100 can cover the maximum distance (about 22m) from the bottom of the tank to the top, and the scanner can obtain a full-view point cloud inside the tank at the top of the tank. In order to prevent SLAM100 from scanning useless data outside the tank and bringing unnecessary workload to the subsequent point cloud processing, the scanning process of SLAM100 (starting, initialization, scanning, and shutting down) is all carried out inside the tank. It takes about 5 minutes to scan a tank, and a total of 3 tanks are scanned.


Point Cloud Solution
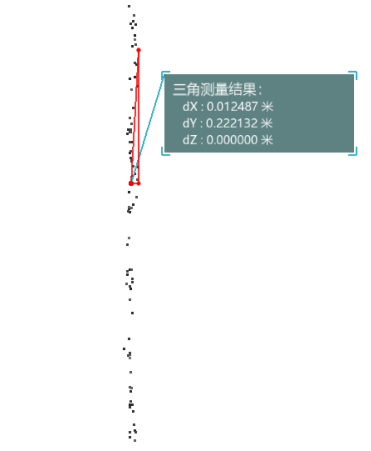
The inside of the tank is smooth and has no obvious features. It is a scene with weak features and weak textures, which brings great challenges to point cloud matching. With the help of industrial-grade SLAM algorithm and strict matching threshold, the matching error is reduced, and the point cloud solution is completed. The point cloud results are both high-precision and high-precision. The point cloud density is uniform, the surface is flat and noise-free, and the thickness is about 1.2cm. This helps point cloud packaging to obtain a better and more accurate tank model, and also reduces the need for The number of processing times for model smoothing and denoising. It takes about 10 minutes to solve a single tank point cloud.
Point Cloud Streamlining
In order to improve the encapsulation effect of the tank model and speed up the model optimization, the point cloud can be simplified on the premise of ensuring the integrity of the feature shape of the point cloud. By comparing and analyzing the effects of three common sampling methods (spatial distance thinning, voxel thinning, and random sampling), the spatial distance sampling method was selected to simplify the point cloud. After multiple parameter adjustments, the sampling distance was finally determined to be 0.05m. The original point cloud data contains 626,6854 points, and the sampled point cloud data contains 169,190 points.
Model Encapsulation and Volume Calculation
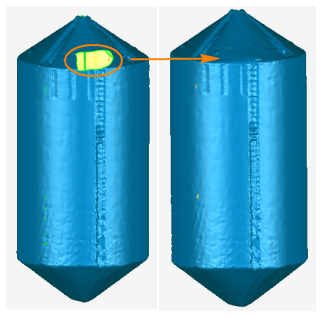
Complete point cloud data is helpful for tank model encapsulation and reduces model vulnerabilities. Since there is an opening on the top of the tank, surface fitting can be performed according to the point cloud data around it, and the tank can be packaged as a whole to eliminate model loopholes. The packaging of a single tank model takes about 20 minutes.
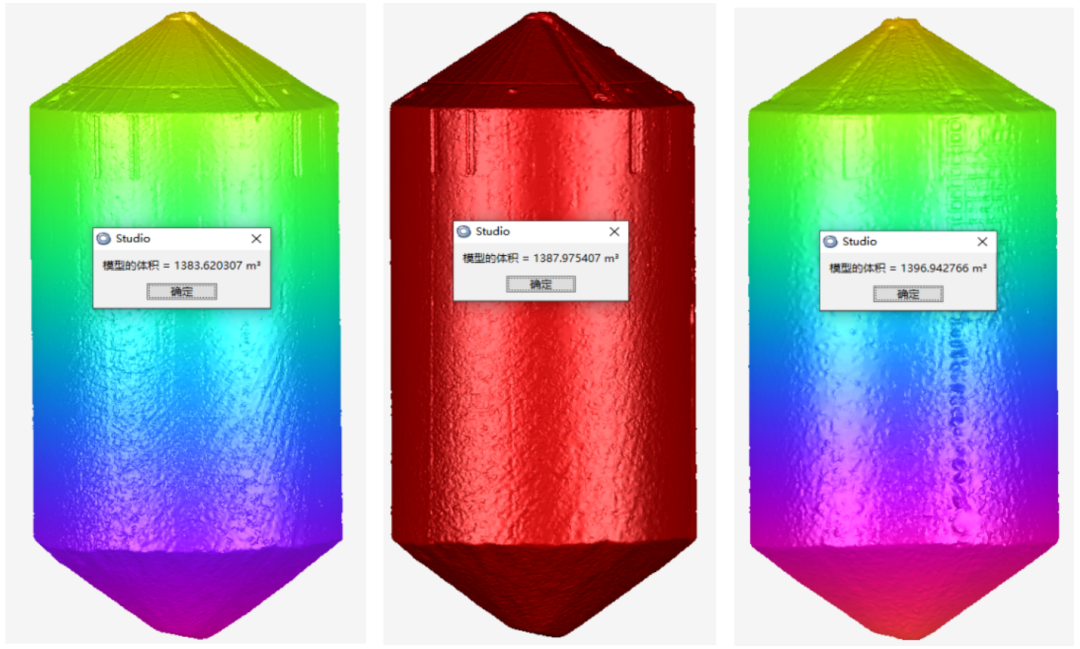
Use analysis tools to calculate tank volumes. The volumes of the three tanks are 1383.62m³, 1387.98m³, and 1396.94m³ respectively. After communicating with the owner, the empty volume of the tank is 1400m³. Since there is a small amount of residual feed at the bottom of the tank during field scanning, the calculation results are all less than 1400m³, which is in line with the actual situation.
Summary
SLAM100 has the advantages of high efficiency and accuracy in the volume measurement of large tanks. It breaks through the constraints and shortcomings of conventional measurement methods to obtain a single point, avoids frequent station changes and data splicing problems of station scanners, and can realize fast digital three-dimensional tanks Scanning and point cloud results have high precision and complete structure. Through point cloud packaging, 1:1 reproduction of the tank body can be realized, and the volume of the tank body can be accurately calculated.
